中科大自主研發(fā)的機(jī)器人柔性手爪國(guó)際獲獎(jiǎng)
 參與互動(dòng)
參與互動(dòng)合肥在線訊(記者 甄旭 秦鳴)隨著全球機(jī)器人產(chǎn)業(yè)發(fā)展進(jìn)入高潮,,需求驅(qū)動(dòng)的源頭技術(shù)競(jìng)爭(zhēng)日趨白熱化,。中國(guó)科學(xué)技術(shù)大學(xué)自主研發(fā)的一款機(jī)器人柔性手爪,,可抓握多種形狀、尺寸和材質(zhì)的物體,,日前獲得第21屆RoboCup機(jī)器人世界杯及學(xué)術(shù)大會(huì)“最佳操作獎(jiǎng)”,。

傳統(tǒng)機(jī)器人是剛性機(jī)器人,,基于關(guān)節(jié)-連桿結(jié)構(gòu),,自上世紀(jì)60年代起在傳統(tǒng)制造業(yè)中實(shí)現(xiàn)了大規(guī)模產(chǎn)業(yè)應(yīng)用。然而,,剛性手爪存在原理性局限,,只能操作少數(shù)剛性規(guī)則形狀物體,而且成本高,、控制難度大,、環(huán)境要求苛刻,遠(yuǎn)遠(yuǎn)不能滿足智能制造,、物流,、家政服務(wù)、農(nóng)業(yè)作業(yè),、救援,、安防和國(guó)防等市場(chǎng)空間巨大的新產(chǎn)業(yè)需求,已成為當(dāng)前機(jī)器人產(chǎn)業(yè)發(fā)展的一個(gè)關(guān)鍵性瓶頸,。

中國(guó)科大自主研發(fā)的柔性手爪采用剛-柔合一,、電-氣互補(bǔ)的設(shè)計(jì)原理,突破了剛性手爪的局限性,,顯著提高了手爪與被操作物體表面之間的貼合度,,有效降低了物體形狀分析的精度要求,極大改善了手爪與操作環(huán)境之間的可接觸性,。與現(xiàn)有各種剛性,、柔性、軟體手爪相比,,具有更強(qiáng)的適應(yīng)性,,可操作更多具有不同形狀、大小和表面特性的物體,,具有極其廣闊的應(yīng)用前景,。

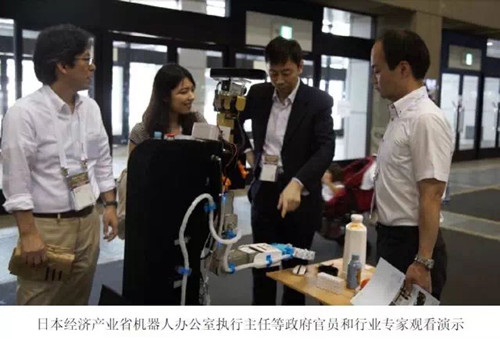
“第21屆RoboCup機(jī)器人世界杯及學(xué)術(shù)大會(huì)”于7月24-31日在日本名古屋舉行。在服務(wù)機(jī)器人比賽中創(chuàng)新性最強(qiáng)的“開放挑戰(zhàn)”測(cè)試中,,中國(guó)科大柔性手爪獲得了唯一的“最佳操作獎(jiǎng)”,。國(guó)際人工智能學(xué)會(huì)前主席、IEEE/AAAI/AAAS Fellow,、美國(guó)卡內(nèi)基-梅隆大學(xué)機(jī)器學(xué)習(xí)系主任Manuela Veloso教授,,世界人工智能青年科學(xué)家最高獎(jiǎng)獲得者、AAAI Fellow、美國(guó)德州大學(xué)Peter Stone教授,,RoboCup家庭機(jī)器人主席,、意大利羅馬大學(xué)Luca Iocchi教授,日本經(jīng)濟(jì)產(chǎn)業(yè)省機(jī)器人辦公室執(zhí)行主任等政府官員和行業(yè)現(xiàn)場(chǎng)專家觀看中國(guó)科大柔性手爪的演示,,并給予高度評(píng)價(jià),。Peter Stone教授當(dāng)場(chǎng)表示,希望美國(guó)德州大學(xué)的機(jī)器人能盡快用上中國(guó)科大柔性手爪,。
中國(guó)科大陳小平團(tuán)隊(duì)自2011年起開始軟體機(jī)器人研究,,自主研發(fā)的氣動(dòng)蜂巢網(wǎng)柔性手臂曾在“第13屆國(guó)際機(jī)器人與仿生學(xué)大會(huì)”上獲得最高獎(jiǎng)。本次發(fā)布的柔性手爪進(jìn)一步拓展了該方向的研發(fā)路徑,,極大地增強(qiáng)了成果的實(shí)用性潛力,,并初步形成了柔性執(zhí)行器的一套較為完整的自主研發(fā)體系,為后續(xù)科研和產(chǎn)業(yè)應(yīng)用奠定了堅(jiān)實(shí)的基礎(chǔ),。
以美國(guó)哈佛大學(xué)等世界一流實(shí)驗(yàn)室為先行者,,軟體機(jī)器人研究在短短幾年內(nèi)成為機(jī)器人源頭技術(shù)競(jìng)爭(zhēng)的一個(gè)戰(zhàn)略制高點(diǎn)。我國(guó)除中國(guó)科大外,,哈爾濱工業(yè)大學(xué),、北京航空航天大學(xué),、上海交通大學(xué)、浙江大學(xué)、北京化工大學(xué),、同濟(jì)大學(xué)等高校均開展了科研攻關(guān)并取得重要進(jìn)展,,國(guó)家自然科學(xué)基金委也快速啟動(dòng)了相關(guān)項(xiàng)目,。